Sarthak Mishra
Robotics Research Center (RRC)
International Institute of Information Technology, Hyderabad, India
I am currently pursuing my MS by Research with a specialization in Robotics, where I am advised by
Prof. Spandan Roy
.
My main research deals with language guided aerial manipulation and robot control.
Previously, I worked as a Research Associate on a medical robotics
project with AIIMS New Delhi funded by the Indian Council of Medical Research (ICMR).
News
- Mar 2026 — AeroPlace-Flow: Language-Grounded Object Placement for Aerial Manipulators via Visual Foresight and Object Flow available on arXiv
- Dec 2025 — BRIS: Bab_Sak Robotic Intubation System available on arXiv
- Nov 2025 — AERMANI-VLM paper available on arXiv
- Oct 2025 — Robotics TA for Research Affiliate Program
- Jan 2025 — TA for Course EC4.501 Advances in Robotics and Control
- Jan 2024 — Started MS at IIIT Hyderabad
Research
AeroPlace-Flow: Language-Grounded Object Placement for Aerial Manipulators via Visual Foresight and Object Flow
Sarthak Mishra, Rishabh Dev Yadav, Naveen Nair, Wei Pan and Spandan Roy.
arXiv, 2026 - Under Review
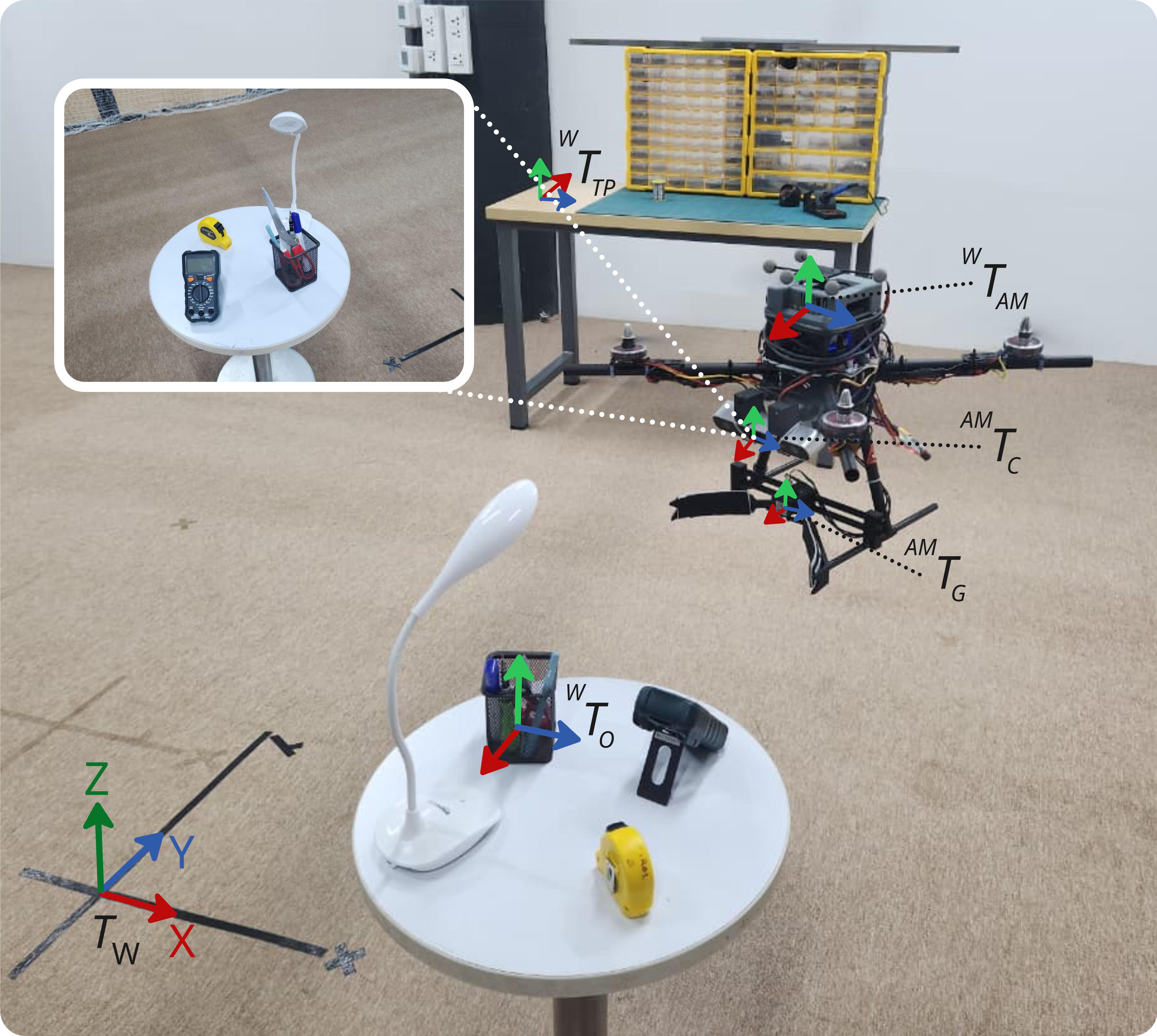
In this work, we present AeroPlace-Flow, a training-free framework for language-grounded aerial object placement that unifies visual foresight with explicit 3D geometric reasoning and object flow.
AERMANI-VLM: Structured Prompting and Reasoning for Aerial Manipulation with Vision Language Models
Sarthak Mishra, Rishabh Dev Yadav, Avirup Das, Saksham Gupta, Wei Pan and Spandan Roy.
arXiv, 2025 - Under Review
We present AERMANI-VLM, a framework that adapts pretrained vision-language models
for language-guided aerial manipulation by separating high-level reasoning from
low-level control without task-specific fine-tuning.
Bab_Sak Robotic Intubation System (BRIS): A Learning-Enabled Control Framework for Safe Fiberoptic
Endotracheal Intubation
Saksham Gupta, Sarthak Mishra, Arshad Ayub, Kamran Farooque, Spandan Roy and Babita Gupta.
arXiv, 2025 - Under Review, Provisional Patent Number: 202311072640
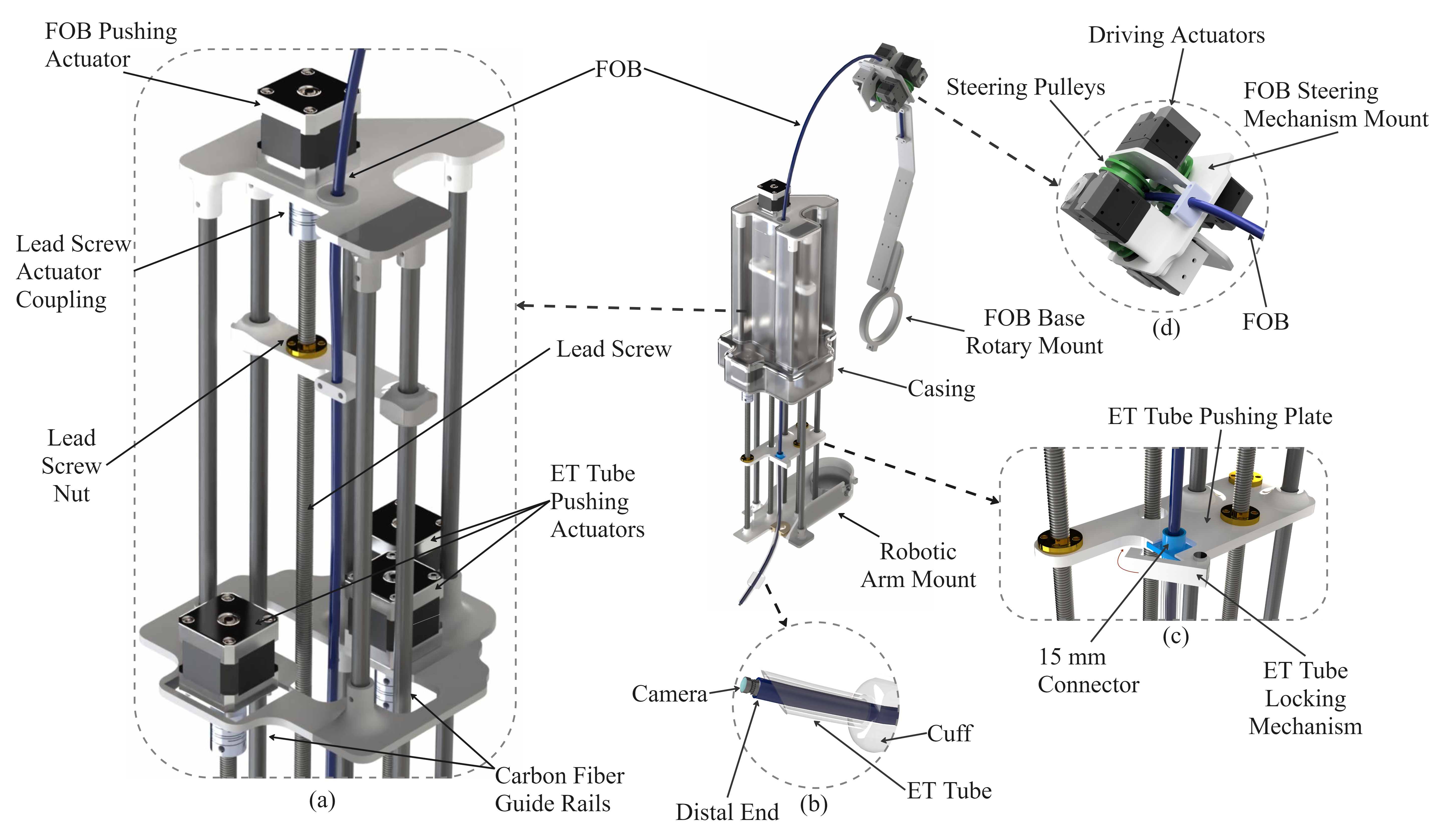
This paper presents BRIS, a human-in-the-loop robotic platform designed to assist
fiberoptic-guided endotracheal intubation with learning-enabled control for safe
clinical deployment.
Experience
Robotics Research Center — IIIT Hyderabad
Research Associate (2023 – Present)
Work on robotic arms, quadcopters, aerial grasping, and robotic medical systems.
AIIMS – ICMR
Research Associate (2021 – 2024)
Developed control systems and AI tools for robotic medical procedures.
Team Darvin — Intelligent Ground Vehicle Competition - Oakland University Detroit
Team Captain (2021 – 2023)
Achieved 3rd and 7th place internationally.
MPSTME Racing Team
Core Member of Data Aquisition and Electronics Team (2018 – 2019)
Built a custom dashboard with GPS for data logging and displaying for an rugged All Terain Vehicle for the Baja competition.
Projects
MPC Based Holonomic Navigation Robot
Designed and built a 4-wheel holonomic mobile robot with LiDAR, implemented ROS2 Nav2
stack for navigation, SLAM Toolbox for mapping and localization, and custom MPC/MPPI
planners for control.
MonoCopter
Developed a single-propeller aerial vehicle with thrust vectoring for stabilization
and control as part of a minor research project.
3D Dense Reconstruction from Monocular Images
Generated dense 3D scene reconstructions from RGB image sequences using camera
intrinsics/extrinsics, multi-view geometry, and optimization techniques.
Face Editing with GANs
Performed facial attribute manipulation using the latent space of a pretrained
StyleGAN model for controllable image editing.
Arduino Based Quadcopter
Built an F450 quadcopter with a custom Arduino-based PCB and flight firmware written
from scratch for stabilization and control.
Custom Arduino PCB Design
Designed and manufactured a custom Arduino board with NRF24L01, LoRa, and ESP8266
connectivity using EasyEDA and hand soldering.
Face, Eye and Fingertip Detection and Tracking
Implemented real-time tracking using OpenCV Haar cascade classifiers for face/eye
detection and histogram-based fingertip localization.
Stock Market Prediction
Developed a stock price prediction system using linear regression (scikit-learn)
with a GUI built in Tkinter.
Last updated: Mar 2026